【新】バランス理論の数式表現 その3(3人の相互作用)
前回の【新】バランス理論の数式表現 その2(自分の評価も考慮)では、ハイダーのバランス理論を数式表現する際に次の(1)~(6)の式を仮定して、どのようなふるまいをするか確認するために(2)と(4)以外は一定にした状態で Wac(t) と Wbc(t) がどのように変化するかグラフで示した。
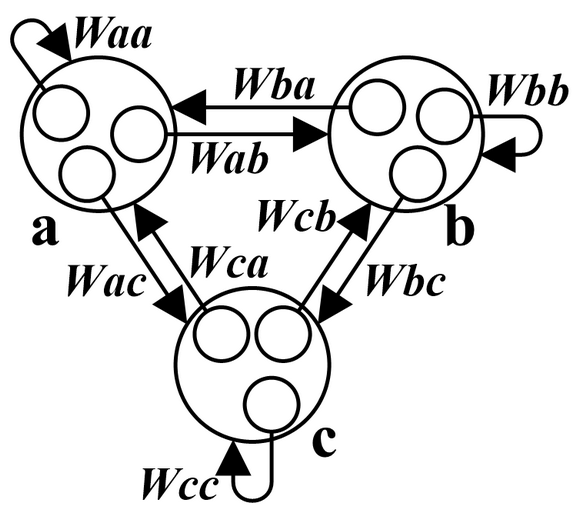
\( \begin{cases} W_{ab}(t+dt) =\dfrac{W_{aa}(t) \cdot W_{ab}(t) + W_{ac}(t) \cdot W_{cb}(t)}{|W_{aa}(t)| + |W_{ac}(t)| }\cdots(1)\\ \\ W_{ac}(t+dt) =\dfrac{W_{aa}(t) \cdot W_{ac}(t) + W_{ab}(t) \cdot W_{bc}(t)}{|W_{aa}(t)| + |W_{ab}(t)| }\cdots(2)\\ \\ W_{ba}(t+dt) =\dfrac{W_{bb}(t) \cdot W_{ba}(t) + W_{bc}(t) \cdot W_{ca}(t)}{|W_{bb}(t)| + |W_{bc}(t)| }\cdots(3)\\ \\ W_{bc}(t+dt) =\dfrac{W_{bb}(t) \cdot W_{bc}(t) + W_{ba}(t) \cdot W_{ac}(t)}{|W_{bb}(t)| + |W_{ba}(t)| }\cdots(4)\\ \\ W_{ca}(t+dt) =\dfrac{W_{cc}(t) \cdot W_{ca}(t) + W_{cb}(t) \cdot W_{ba}(t)}{|W_{cc}(t)| + |W_{cb}(t)| }\cdots(5)\\ \\ W_{cb}(t+dt) =\dfrac{W_{cc}(t) \cdot W_{cb}(t) + W_{ca}(t) \cdot W_{ab}(t)}{|W_{cc}(t)| + |W_{ca}(t)| }\cdots(6)\\ \end{cases} \)
ここでは、a、b、cのそれぞれの荷重の初期状態( Waa(0), Wab(0), Wac(0), Wba(0), Wbb(0), Wbc(0), Wca(0), Wcb(0), Wcc(0) )を変えて、それぞれの荷重( Wab(t), Wac(t), Wba(t), Wbc(t), Wca(t), Wcb(t) )がどのように変化するかグラフで見てみる。数が多いので個別の考察は省く。
ハイダーのバランス理論では、次の(A)~(F)の状態では安定で、(G)~(L)の状態では不安定である。そのことを踏まえながら以下の図を見てほしい。
\( \begin{cases} W_{ab}(t) \cdot W_{bc}(t) \cdot W_{ac}(t) > 0\cdots(A)\\ W_{ab}(t) \cdot W_{cb}(t) \cdot W_{ac}(t) > 0\cdots(B)\\ W_{ba}(t) \cdot W_{ac}(t) \cdot W_{bc}(t) > 0\cdots(C)\\ W_{ba}(t) \cdot W_{ca}(t) \cdot W_{bc}(t) > 0\cdots(D)\\ W_{ca}(t) \cdot W_{ab}(t) \cdot W_{cb}(t) > 0\cdots(E)\\ W_{ca}(t) \cdot W_{ba}(t) \cdot W_{cb}(t) > 0\cdots(F)\\ W_{ab}(t) \cdot W_{bc}(t) \cdot W_{ac}(t) < 0\cdots(G)\\ W_{ab}(t) \cdot W_{cb}(t) \cdot W_{ac}(t) < 0\cdots(H)\\ W_{ba}(t) \cdot W_{ac}(t) \cdot W_{bc}(t) < 0\cdots(I)\\ W_{ba}(t) \cdot W_{ca}(t) \cdot W_{bc}(t) < 0\cdots(J)\\ W_{ca}(t) \cdot W_{ab}(t) \cdot W_{cb}(t) < 0\cdots(K)\\ W_{ca}(t) \cdot W_{ba}(t) \cdot W_{cb}(t) < 0\cdots(L)\\ \end{cases} \)
ちなみに自己評価( Waa(t), Wbb(t), Wcc(t) )がマイナスの場合は次のように考えると、常に不安定である。
\( \begin{cases} W_{aa}(t) \cdot W_{ab}(t) \cdot W_{ab}(t) < 0\cdots(M)\\ W_{aa}(t) \cdot W_{ac}(t) \cdot W_{ac}(t) < 0\cdots(N)\\ W_{bb}(t) \cdot W_{ba}(t) \cdot W_{ba}(t) < 0\cdots(O)\\ W_{bb}(t) \cdot W_{bc}(t) \cdot W_{bc}(t) < 0\cdots(P)\\ W_{cc}(t) \cdot W_{ca}(t) \cdot W_{ca}(t) < 0\cdots(Q)\\ W_{cc}(t) \cdot W_{cb}(t) \cdot W_{cb}(t) < 0\cdots(R)\\ \end{cases} \)
初期状態を Waa(0)=1, Wab(0)=2, Wac(0)=0, Wba(0)=1, Wbb(0)=1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1 にすると、それぞれの荷重は次の図1のように変化する。
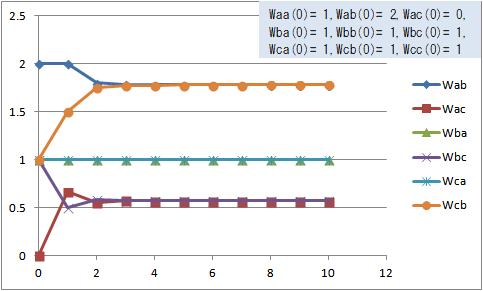
図1 荷重の変化(Waa(0)=1, Wab(0)=2, Wac(0)=0, Wba(0)=1, Wbb(0)=1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1)
初期状態を Waa(0)=1, Wab(0)=2, Wac(0)=0, Wba(0)=2, Wbb(0)=1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1 にすると、それぞれの荷重は次の図2のように変化する。
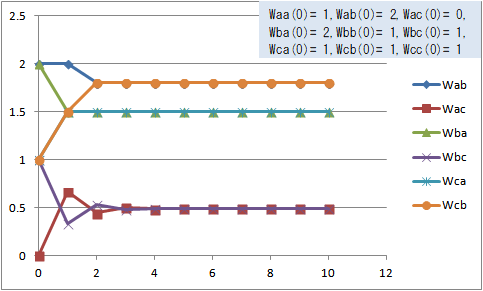
図2 荷重の変化(Waa(0)=1, Wab(0)=2, Wac(0)=0, Wba(0)=2, Wbb(0)=1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1)
初期状態を Waa(0)=10, Wab(0)=2, Wac(0)=0, Wba(0)=2, Wbb(0)=1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1 にすると、それぞれの荷重は次の図3のように変化する。
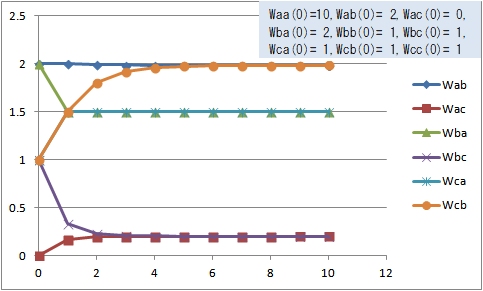
図3 荷重の変化(Waa(0)=10, Wab(0)=2, Wac(0)=0, Wba(0)=2, Wbb(0)=1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1)
初期状態を Waa(0)=1, Wab(0)=2, Wac(0)=-2, Wba(0)=2, Wbb(0)=1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1 にすると、それぞれの荷重は次の図4のように変化する。
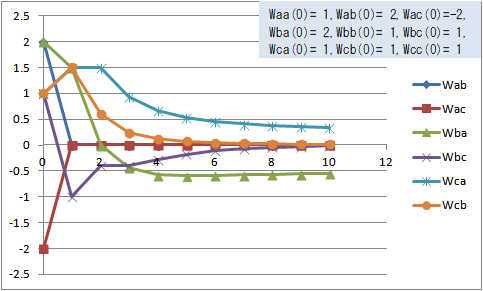
図4 荷重の変化(Waa(0)=1, Wab(0)=2, Wac(0)=-2, Wba(0)=2, Wbb(0)=1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1)
初期状態を Waa(0)=-1, Wab(0)=2, Wac(0)=0, Wba(0)=2, Wbb(0)=1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1 にすると、それぞれの荷重は次の図5のように変化する。
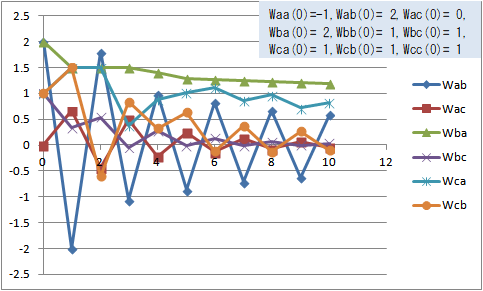
図5 荷重の変化(Waa(0)=-1, Wab(0)=2, Wac(0)=0, Wba(0)=2, Wbb(0)=1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1)
初期状態を Waa(0)=1, Wab(0)=-2, Wac(0)=0, Wba(0)=2, Wbb(0)=1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1 にすると、それぞれの荷重は次の図6のように変化する。
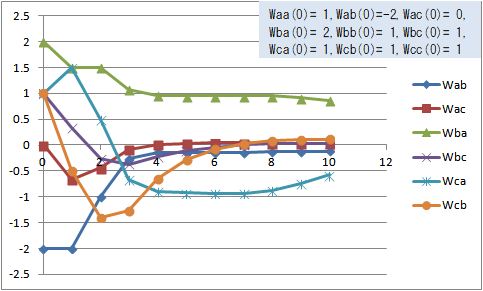
図6 荷重の変化(Waa(0)=1, Wab(0)=-2, Wac(0)=0, Wba(0)=2, Wbb(0)=1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1)
初期状態を Waa(0)=1, Wab(0)=2, Wac(0)=0, Wba(0)=-2, Wbb(0)=1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1 にすると、それぞれの荷重は次の図7のように変化する。
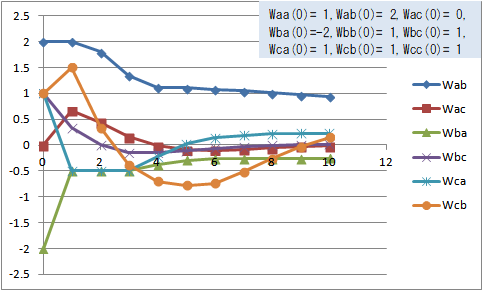
図7 荷重の変化(Waa(0)=1, Wab(0)=2, Wac(0)=0, Wba(0)=-2, Wbb(0)=1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1)
初期状態を Waa(0)=1, Wab(0)=2, Wac(0)=0, Wba(0)=2, Wbb(0)=-1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1 にすると、それぞれの荷重は次の図8のように変化する。
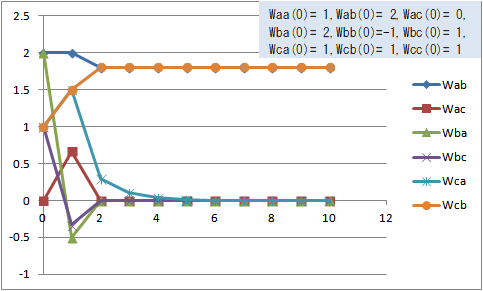
図8 荷重の変化(Waa(0)=1, Wab(0)=2, Wac(0)=0, Wba(0)=2, Wbb(0)=-1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1)
初期状態を Waa(0)=-1, Wab(0)=2, Wac(0)=0, Wba(0)=2, Wbb(0)=-1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1 にすると、それぞれの荷重は次の図9のように変化する。
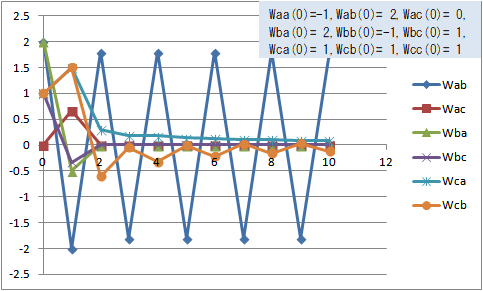
図9 荷重の変化(Waa(0)=-1, Wab(0)=2, Wac(0)=0, Wba(0)=2, Wbb(0)=-1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1)
初期状態を Waa(0)=-1, Wab(0)=2, Wac(0)=0, Wba(0)=-2, Wbb(0)=1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1 にすると、それぞれの荷重は次の図10のように変化する。
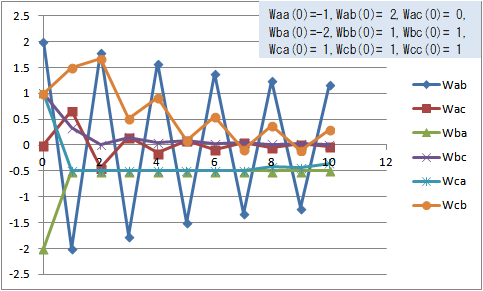
図10 荷重の変化(Waa(0)=-1, Wab(0)=2, Wac(0)=0, Wba(0)=-2, Wbb(0)=1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1)
初期状態を Waa(0)=1, Wab(0)=-2, Wac(0)=0, Wba(0)=-2, Wbb(0)=1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1 にすると、それぞれの荷重は次の図11のように変化する。
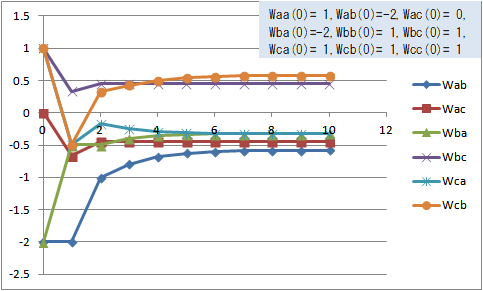
図11 荷重の変化(Waa(0)=1, Wab(0)=-2, Wac(0)=0, Wba(0)=-2, Wbb(0)=1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1)
初期状態を Waa(0)=1, Wab(0)=-2, Wac(0)=0, Wba(0)=2, Wbb(0)=-1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1 にすると、それぞれの荷重は次の図12のように変化する。
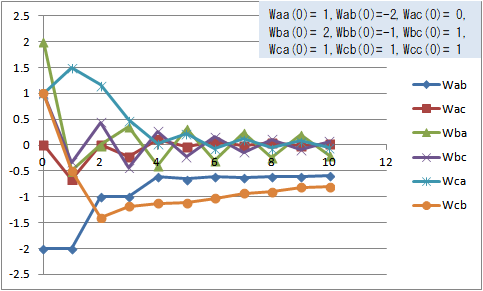
図12 荷重の変化(Waa(0)=1, Wab(0)=-2, Wac(0)=0, Wba(0)=2, Wbb(0)=-1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1)
初期状態を Waa(0)=-1, Wab(0)=-2, Wac(0)=0, Wba(0)=2, Wbb(0)=-1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1 にすると、それぞれの荷重は次の図13のように変化する。
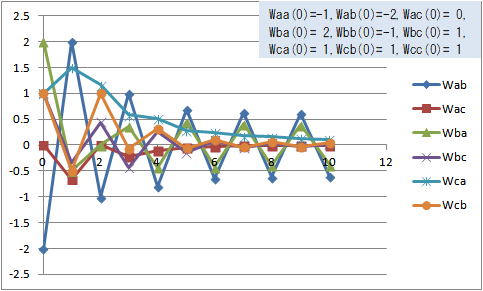
図13 荷重の変化(Waa(0)=-1, Wab(0)=-2, Wac(0)=0, Wba(0)=2, Wbb(0)=-1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1)
初期状態を Waa(0)=-1, Wab(0)=-2, Wac(0)=0, Wba(0)=-2, Wbb(0)=1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1 にすると、それぞれの荷重は次の図14のように変化する。
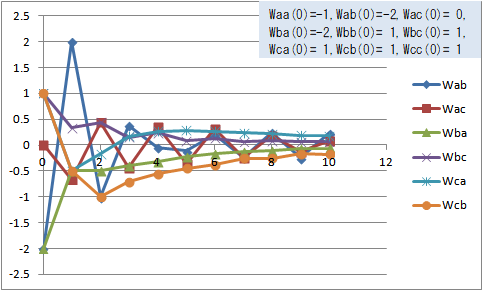
図14 荷重の変化(Waa(0)=-1, Wab(0)=-2, Wac(0)=0, Wba(0)=-2, Wbb(0)=1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1)
初期状態を Waa(0)=-1, Wab(0)=-2, Wac(0)=0, Wba(0)=-2, Wbb(0)=-1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1 にすると、それぞれの荷重は次の図15のように変化する。
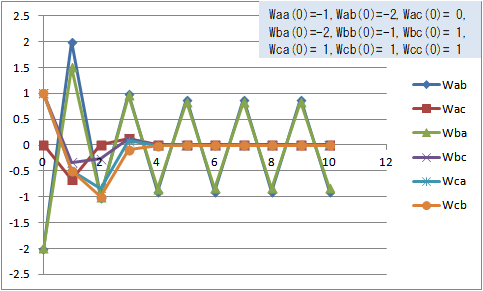
図15 荷重の変化(Waa(0)=-1, Wab(0)=-2, Wac(0)=0, Wba(0)=-2, Wbb(0)=-1, Wbc(0)=1, Wca(0)=1, Wcb(0)=1, Wcc(0)=1)
次回は、上の式(1)~(6)で荷重が0に収束することがある件について考察する。
(追記:2022/10/26)
上の式(1)~(6)の式では自己評価の荷重( Waa(t) 、Wbb(t)、Wcc(t) )がマイナスの場合にも同じ式で良いのか疑問が生じたので、修正案を考えました。
以下の式です。
\( \begin{cases} W_{ab}(t+dt) =\dfrac{|W_{aa}(t)| \cdot W_{ab}(t) + W_{ac}(t) \cdot W_{cb}(t)}{|W_{aa}(t)| + |W_{ac}(t)| }\cdots(1')\\ \\ W_{ac}(t+dt) =\dfrac{|W_{aa}(t)| \cdot W_{ac}(t) + W_{ab}(t) \cdot W_{bc}(t)}{|W_{aa}(t)| + |W_{ab}(t)| }\cdots(2')\\ \\ W_{ba}(t+dt) =\dfrac{|W_{bb}(t)| \cdot W_{ba}(t) + W_{bc}(t) \cdot W_{ca}(t)}{|W_{bb}(t)| + |W_{bc}(t)| }\cdots(3')\\ \\ W_{bc}(t+dt) =\dfrac{|W_{bb}(t)| \cdot W_{bc}(t) + W_{ba}(t) \cdot W_{ac}(t)}{|W_{bb}(t)| + |W_{ba}(t)| }\cdots(4')\\ \\ W_{ca}(t+dt) =\dfrac{|W_{cc}(t)| \cdot W_{ca}(t) + W_{cb}(t) \cdot W_{ba}(t)}{|W_{cc}(t)| + |W_{cb}(t)| }\cdots(5')\\ \\ W_{cb}(t+dt) =\dfrac{|W_{cc}(t)| \cdot W_{cb}(t) + W_{ca}(t) \cdot W_{ab}(t)}{|W_{cc}(t)| + |W_{ca}(t)| }\cdots(6')\\ \end{cases} \)
修正案の式よりもこの記事の式の方が良い場合のことを考慮して、この記事は残しますが、修正案でのグラフは後の「【新】バランス理論の数式表現 その5(3人の相互作用:修正案)」を見てください。




コメント 0